I developed a test setup based on an STM32 microcontroller system to accurately measure the vibration, thrust, and RPM (rotations per minute) values of propellers. The system integrates multiple high-precision sensors, including an Infrared (IR) sensor, Load Cell, Piezoelectric sensor, and Inertial Measurement Unit (IMU), to collect detailed data on propeller behavior during operation.
By processing the data acquired from these sensors, I conducted comprehensive performance analyses of various propellers under different conditions. Additionally, I improved the overall accuracy and reliability of the system by employing a combination of different sensor types and optimizing the real-time data acquisition and analysis processes. This approach enabled precise evaluation and comparison of propeller dynamics, making the setup a valuable tool for testing and validation in aeronautical and mechanical applications.
The source code for this project is available at the following link.
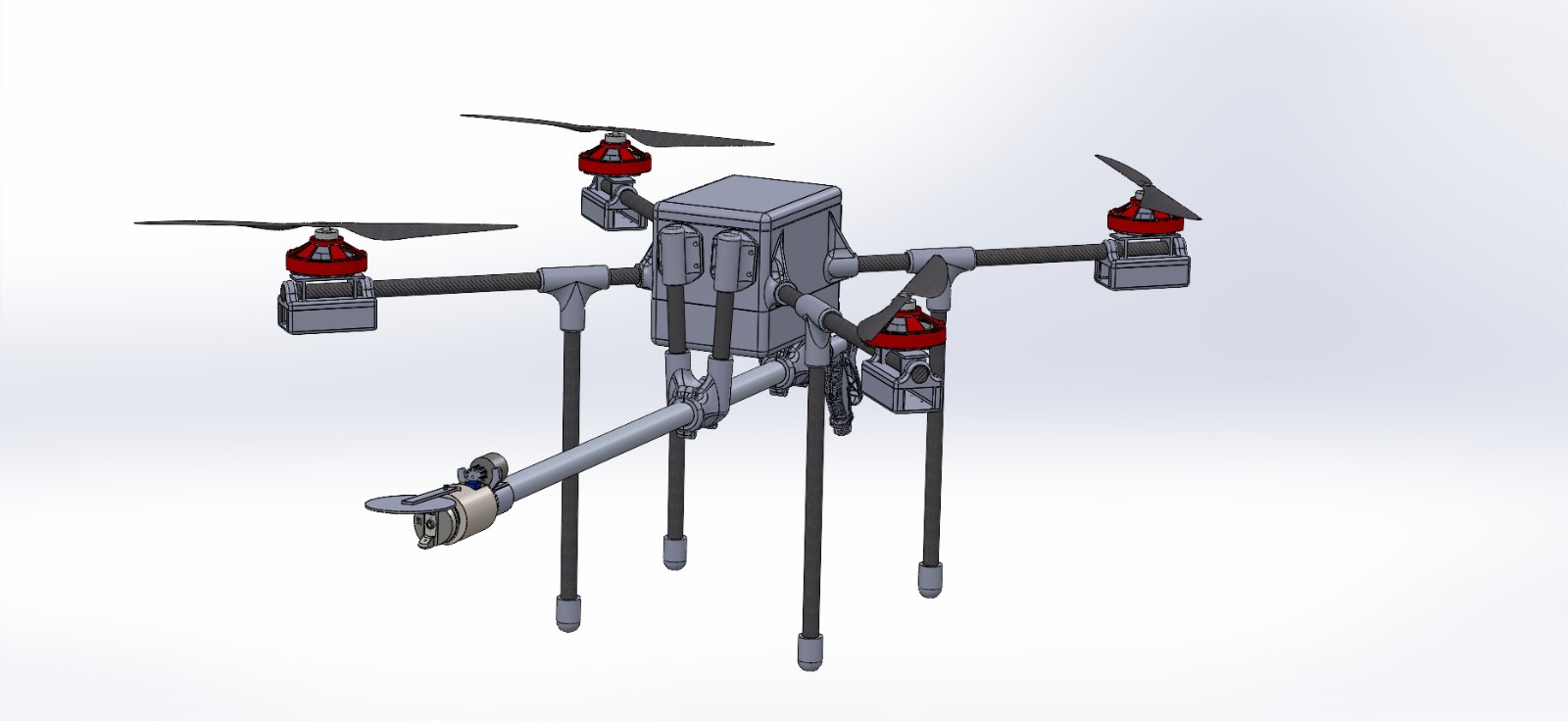
Source CodesAs part of the Teknofest competition, I have been working on the development of an autonomous UAV system designed for exterior wall painting applications. My primary focus areas within the project include embedded software development, embedded system design, sensor integration, and the implementation of control algorithms. I have been responsible for designing and programming the system architecture, integrating various onboard sensors, and developing real-time control strategies to ensure stable and precise autonomous flight during the painting process.
The website for this project is available at the following link.
HAVSALA microcontroller-based propeller durability testing system was developed. A mechanical setup was designed to apply a controlled load to the propeller using stepper motor control, enabling precise detection of the failure point. I designed and implemented an algorithm that processes and analyzes sensor data in real time to accurately identify the moment of structural failure. The system allows for repeatable and controlled stress testing, making it suitable for evaluating material strength and design limitations in propeller prototypes.
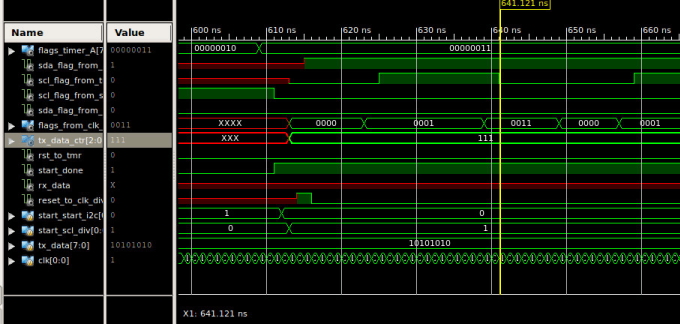
A vending machine system was designed and implemented on an FPGA using the VHDL hardware description language. The system handles core functionalities such as user input, product selection, payment processing, and product dispensing through digital logic circuits and FPGA programming techniques. The architecture was configured to support multiple product options and various payment methods. The entire operation was managed using state machines and modular design principles, ensuring scalability and efficient resource utilization on the FPGA.
The source codes pdf for this project is available at the following link.
Download Source CodesA real-time respiratory monitoring system was developed using Arduino and MATLAB, utilizing a flex sensor to capture breathing patterns. The system processes and analyzes respiratory signals to detect anomalies such as irregular or shallow breathing. A graphical user interface (GUI) was designed in MATLAB to visualize the breathing signals in real time and to provide alerts in case of abnormal respiratory activity. The system enables non-invasive, continuous monitoring and can be adapted for applications in health tracking or early detection of respiratory issues.
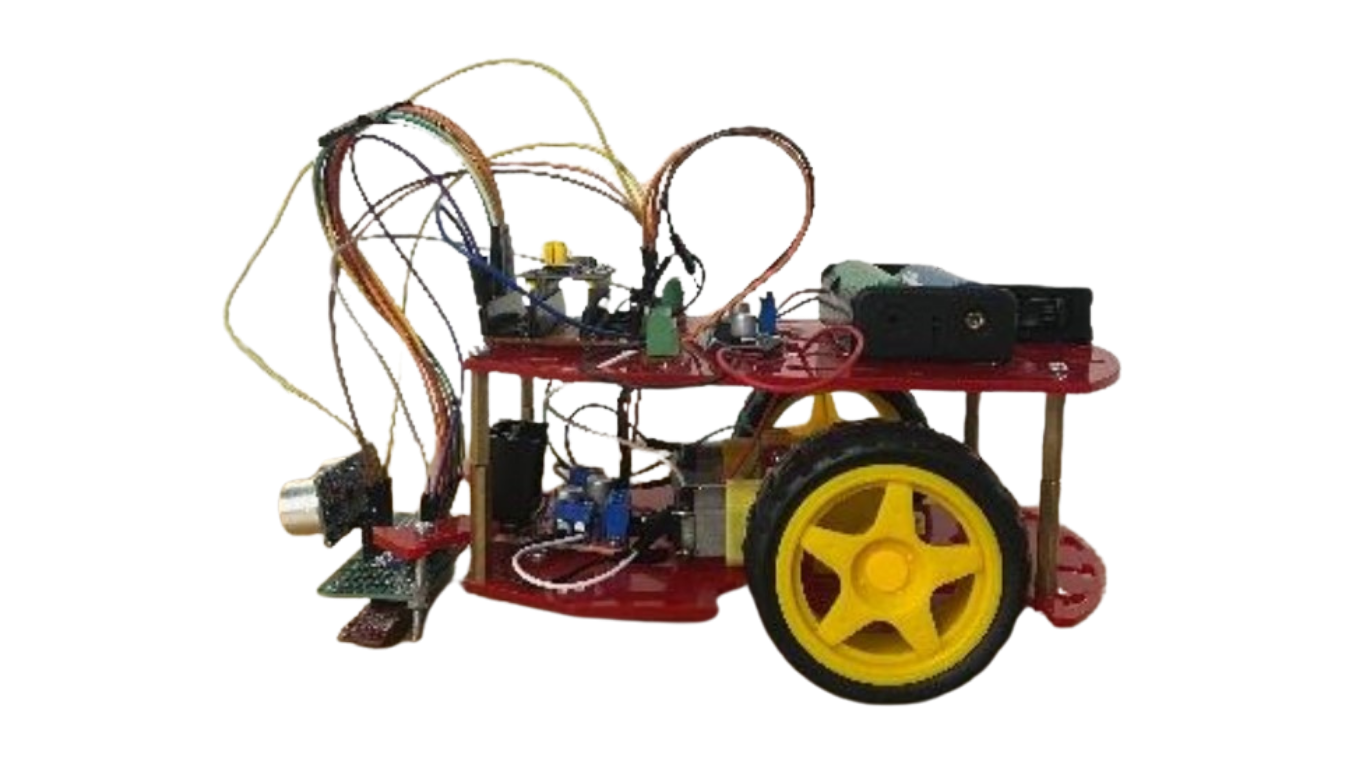
I developed a line-following robot optimized with a PID control algorithm using an STM32 microcontroller. The system processes sensor data in real time to regulate motor speeds, allowing the vehicle to accurately follow a predefined path. The control architecture was designed to minimize tracking errors and ensure smooth and responsive navigation, even at varying speeds or along curves. The integration of precise sensor feedback with a finely tuned PID loop enabled high-accuracy path tracking and stable motion control.
The source code for this project is available at the following link.
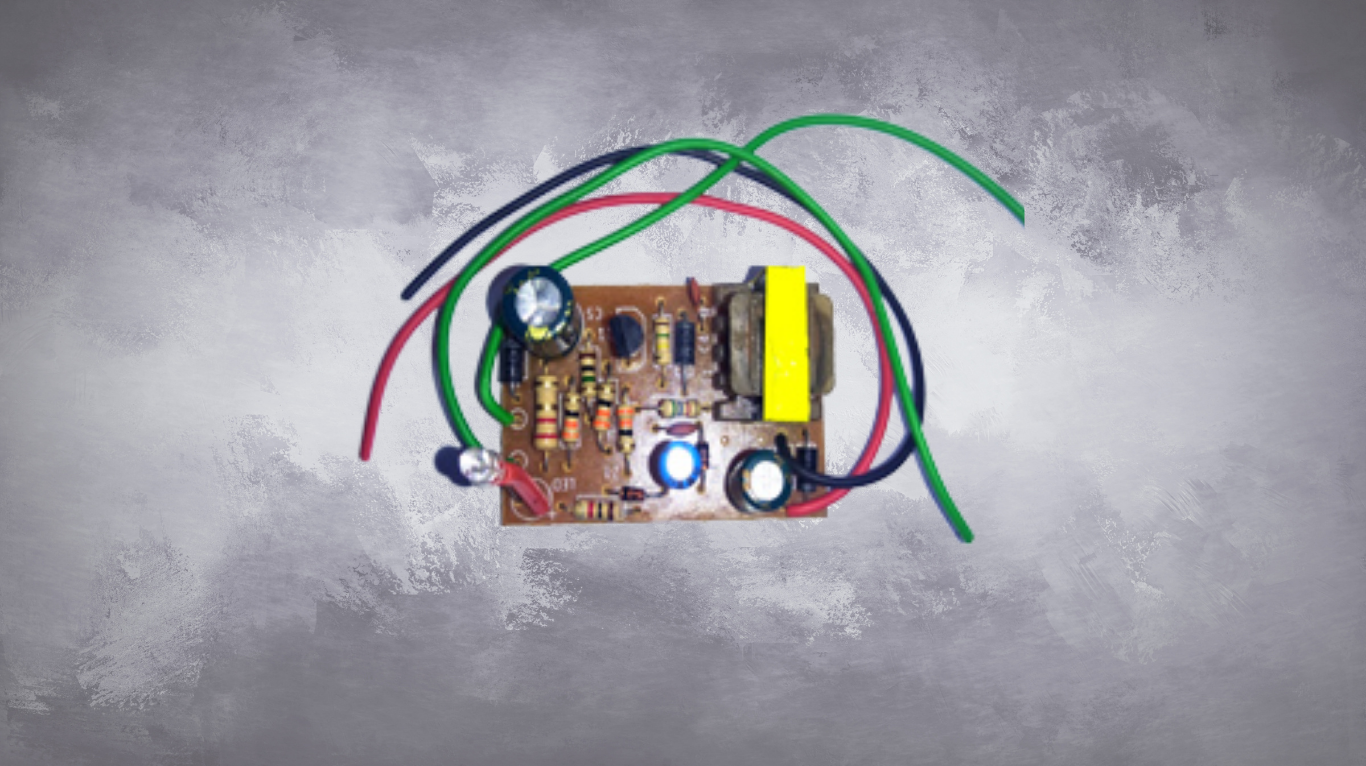
Source CodesAn AC-to-DC power adapter was designed to provide the necessary direct current for electronic devices. The system converts the alternating current (AC) from the mains supply into a stable direct current (DC) output. Specifically, the adapter was configured to deliver a regulated 5V, 1A DC output at the end stage. The design includes a step-down transformer, rectification, filtering, and voltage regulation stages to ensure safe and consistent power delivery suitable for low-power electronic applications.